力学所在血管介入磁控软体导丝安全导航研究方面取得进展
脑血管梗阻引发的缺血性中风是当前人类生命健康的头号杀手。使用细长导丝辅助的血管介入微创手术是一种广泛采用的梗阻疏通疗法。磁性软体导丝(Magnetic Soft Guidewire)的应用,有望实现在复杂血管环境中灵活穿梭,在梗阻疏通领域展现了巨大的应用潜力。然而,如何确保磁性软体导丝在真实血管环境中的安全导航,避免对血管造成损伤,成为了当下亟需解决的关键问题。
力学所研究团队基于硬磁弹性杆理论和最小能量原理构建了两种典型血管(弯曲型和分叉型)约束下的磁性软体导丝的力学模型,系统研究了避免导丝损伤血管的接触条件,并提出了磁性软体导丝安全导航的磁场调控策略。研究成果以Model-guided navigation of magnetic soft guidewire for safe endovascular surgery为题发表在Journal of the Mechanics and Physics of Solids上。
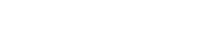
颈内动脉(ICA)的C1段和脑前动脉(ACA)的A1段分别代表了人脑动脉中两种主要的血管类型:弯曲型和分叉型,如图1a所示。图1b和1c展示了磁性软体导丝在这两种血管中的导航过程,由于血管壁所能承受的压强是有限的,为了避免造成血管损伤,分析导丝尖端与血管壁的接触作用是实现安全导航至关重要的一环。这里将导丝尖端与血管壁接触时的夹角定义为接触角,并在后续与接触压强建立联系以评估导丝在血管内导航的安全性。
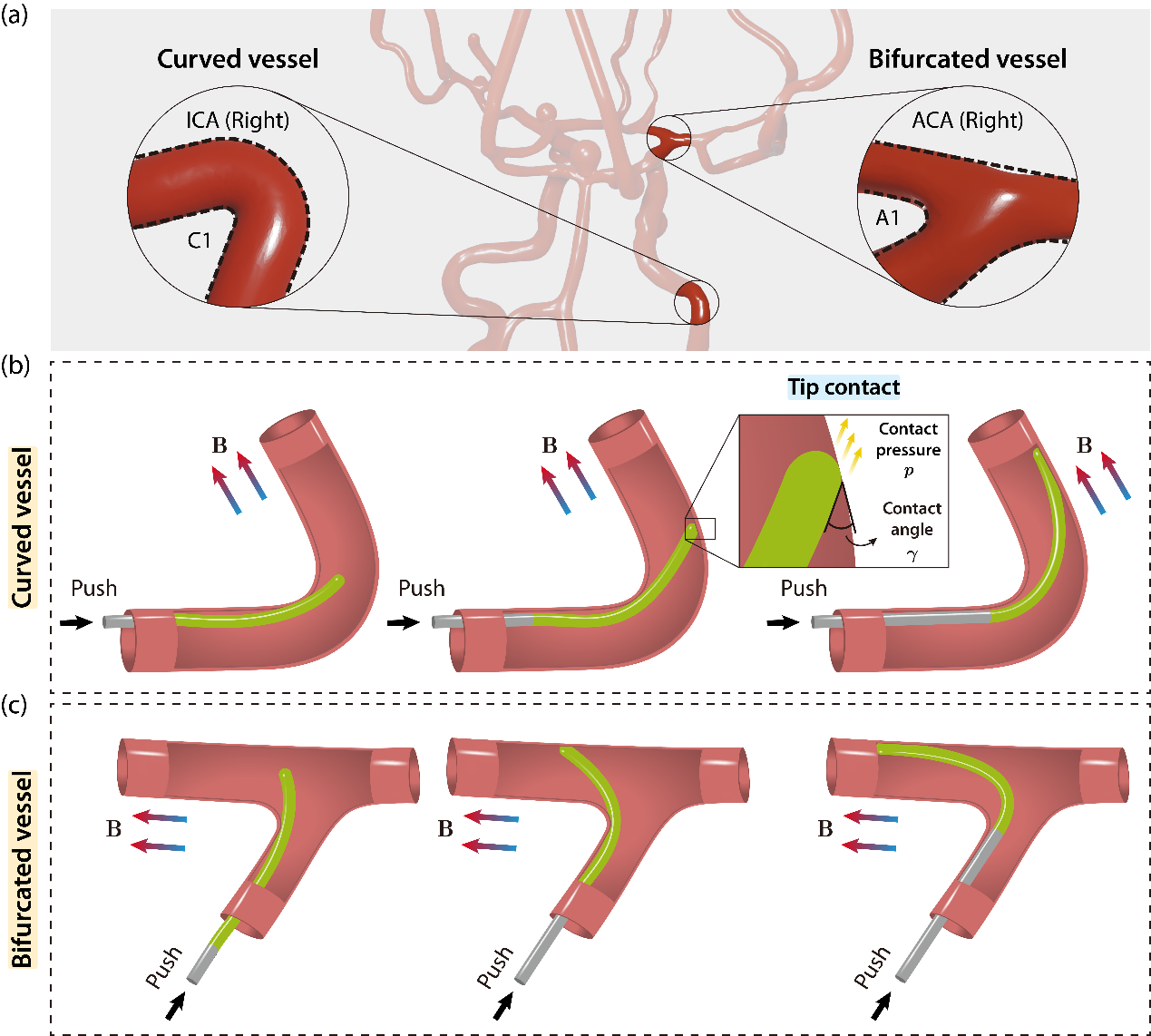
图1 (a)颈内动脉(ICA)的C1段和脑前动脉(ACA)的A1段的示意图;(b)磁性软体导丝在弯曲型血管中的导航过程;(c)磁性软体导丝在分叉型血管中的导航过程
为了建立血管约束,血管被简化描述为由血管直径w、弯曲半径r和弯曲角度α描述的闭合曲线,并离散为由一系列线段组成的多边形(图2),使用“卷绕数规则”(即一种判断点是否在多边形内的经典方法)来限制导丝的变形在血管内部。系统的总能量可以写为由磁势能和弹性势能之和表示的泛函,根据最小能量原理,采用序列二次规划算法求解泛函极值问题,由此得到磁性软体导丝在血管约束下的变形,进而得到接触角度γ。
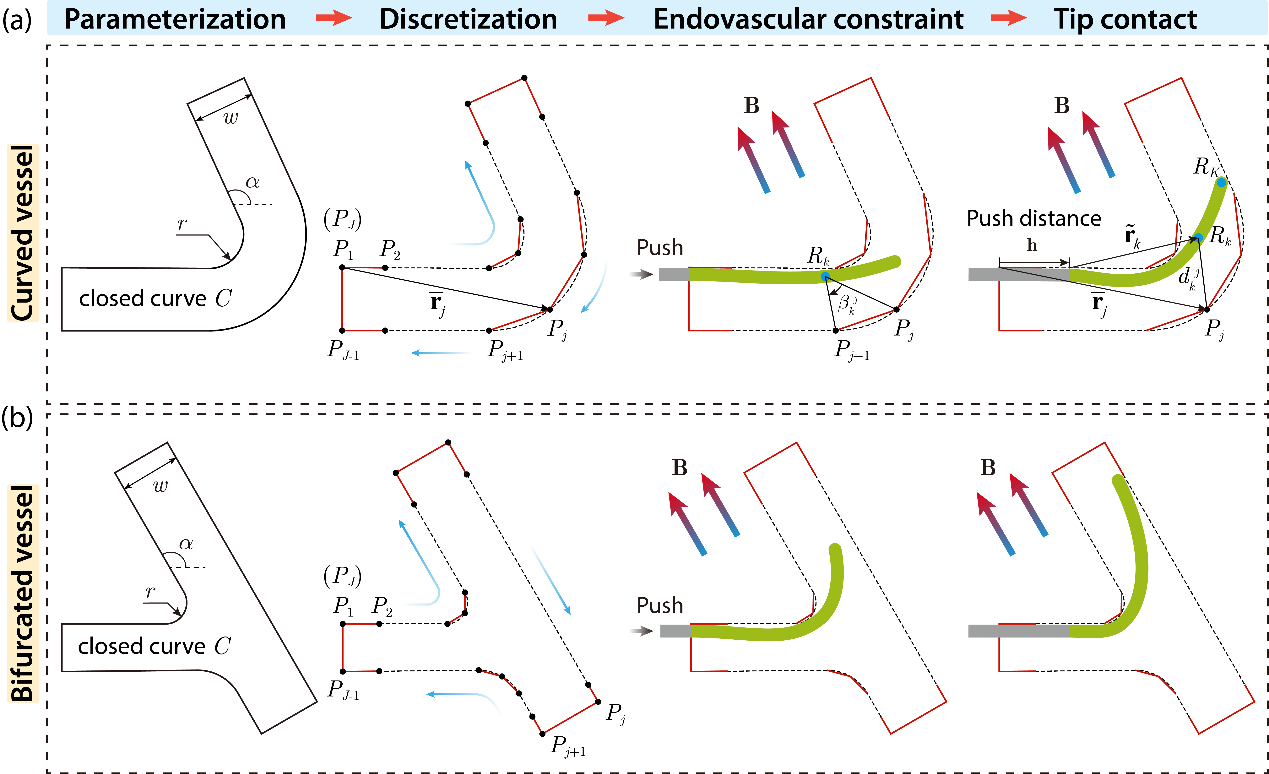
图2 血管约束的建模:(a)弯曲型;(b)分叉型
图3展示了磁性软体导丝在血管内导航过程中与血管壁接触时接触角与接触压强之间的关系。从图3b可以看出,随着导丝的不断推进,接触压强会先增大后减小,存在一个最大值。图3c显示了最大接触压强随着接触角的增大而逐渐增大。安全接触压强为60 kPa的血管对应的临界接触角为40°,因此可认为当接触角小于40°时,磁性软体导丝能够安全通过转弯而不对血管壁造成损伤。采用临界接触角替代临界接触压强作为安全导航判断准则,可有效避免求解接触压强带来的困难,并使得判断更为简洁直观。
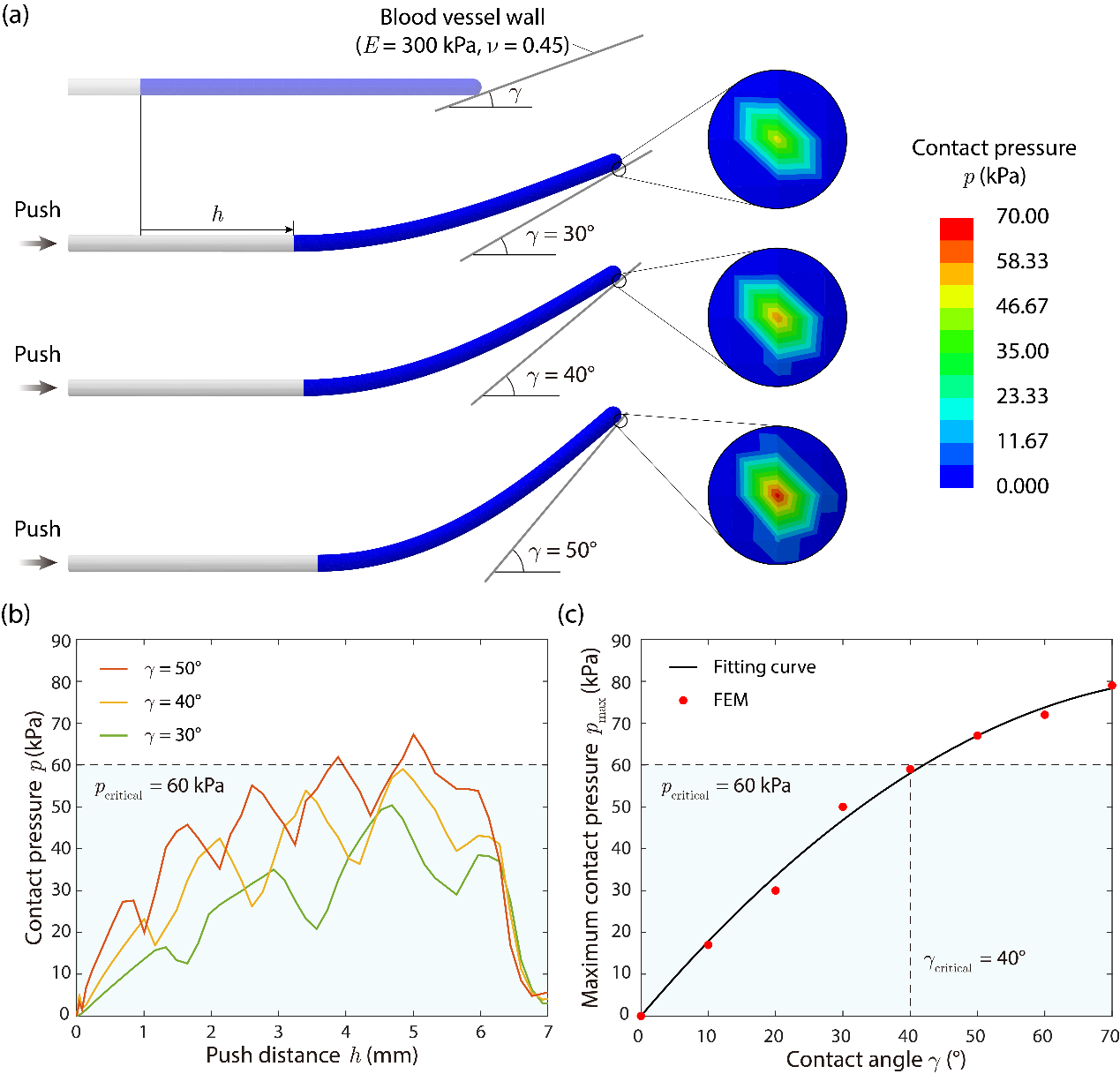
图3 磁性软体导丝与血管壁接触时接触角与接触压强之间的关系
研究团队提出了两种磁场调控策略以实现安全导航:(1)增大磁场强度(2)增大磁场角度。例如对于颈内动脉的C1段,增大磁场强度和角度均能够减小接触角(图4a和b),并计算得出使得接触角小于临界接触角的磁场范围(图4c)。以强度45 mT,角度125°的磁场为例,此时导丝与血管壁接触时的接触角减小为31°(图4d),使得导丝能够安全通过血管转弯处。在血管模型中的实验结果也验证了该磁场调控策略的有效性(图4e)。
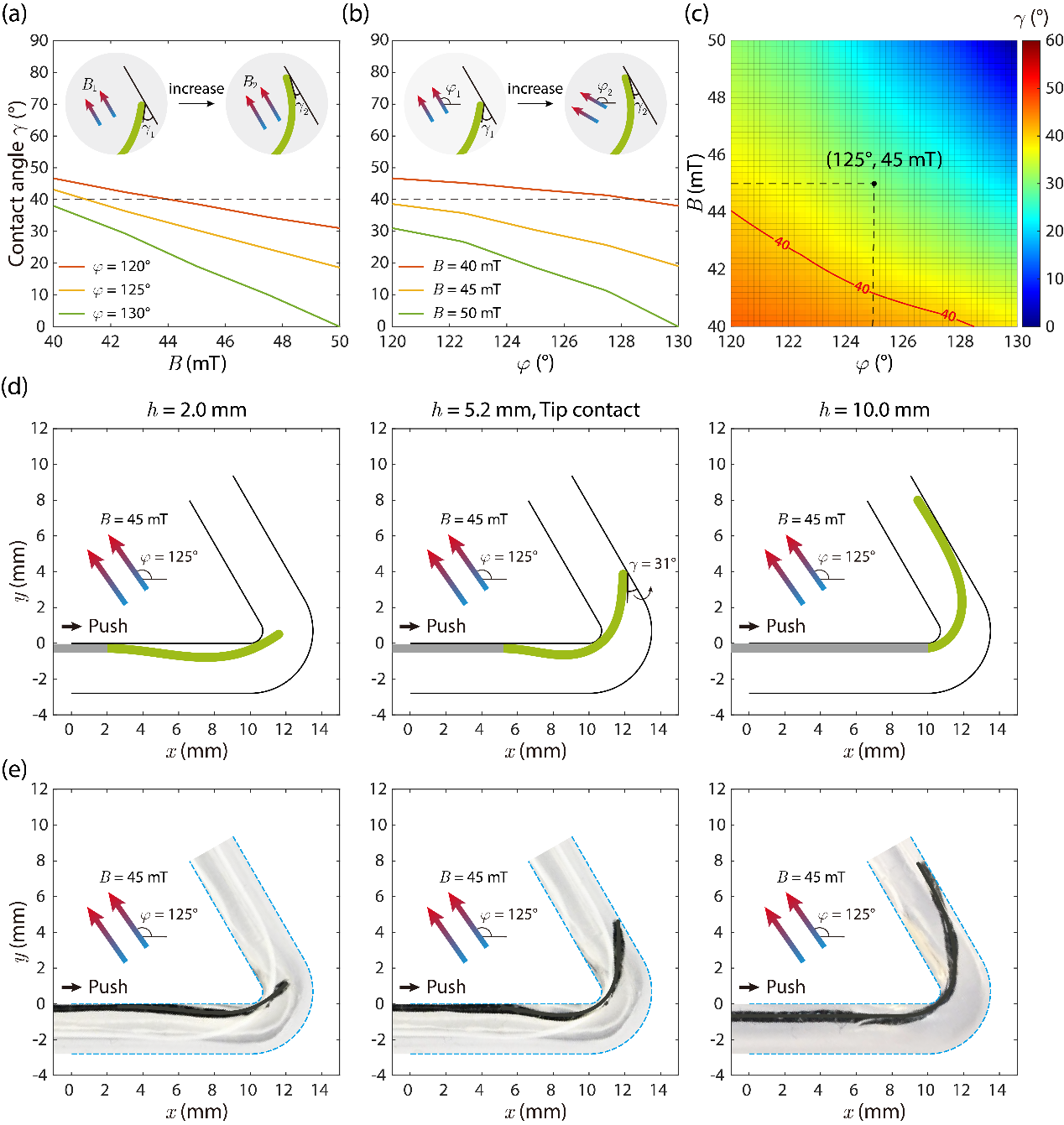
图4 通过调控磁场实现磁性软体导丝在颈内动脉(C1段)内的安全导航。(a)磁场强度与接触角的关系(b)磁场角度与接触角的关系(c)磁场强度、磁场角度与接触角之间的关系;导丝在强度45 mT,角度125°磁场驱动下的导航过程:(d)理论模型(e)实验
同样的调控策略可以用在分叉型血管,例如对于脑前动脉(ACA)的A1段, 以强度55 mT,角度150°的磁场可以使其安全通过(图5)。
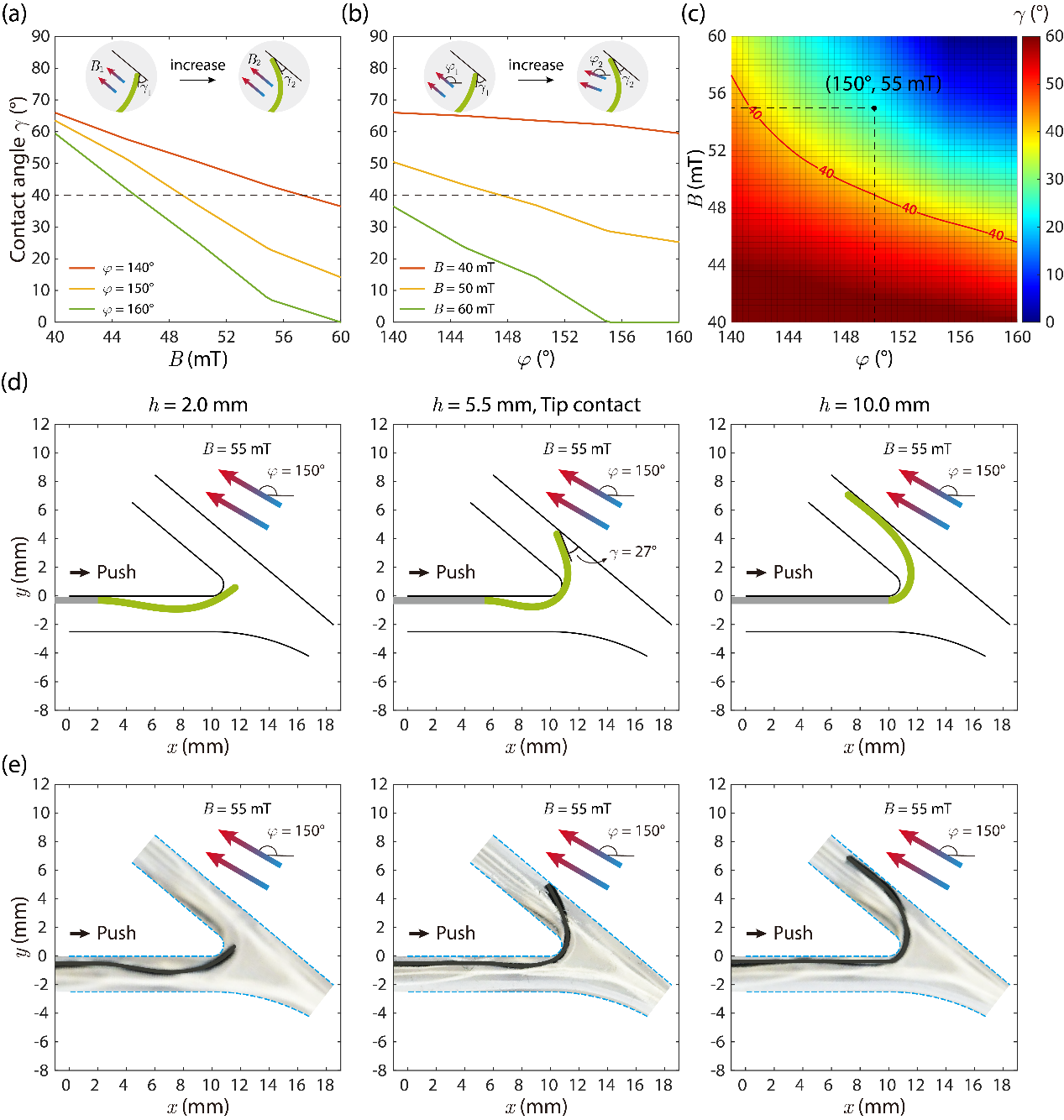
图5 通过调控磁场实现磁性软体导丝在脑前动脉(A1段)内的安全导航。(a)磁场强度与接触角的关系(b)磁场角度与接触角的关系(c)磁场强度、磁场角度与接触角之间的关系;导丝在强度55 mT,角度150°磁场驱动下的导航过程:(d)理论模型(e)实验
此外,该理论模型还能够应用于具有多转弯的弯曲型和分叉型血管(图6),同时也适用于各种尺寸和形状的复杂血管模型,在各种临床场景中具有广泛的应用潜力。
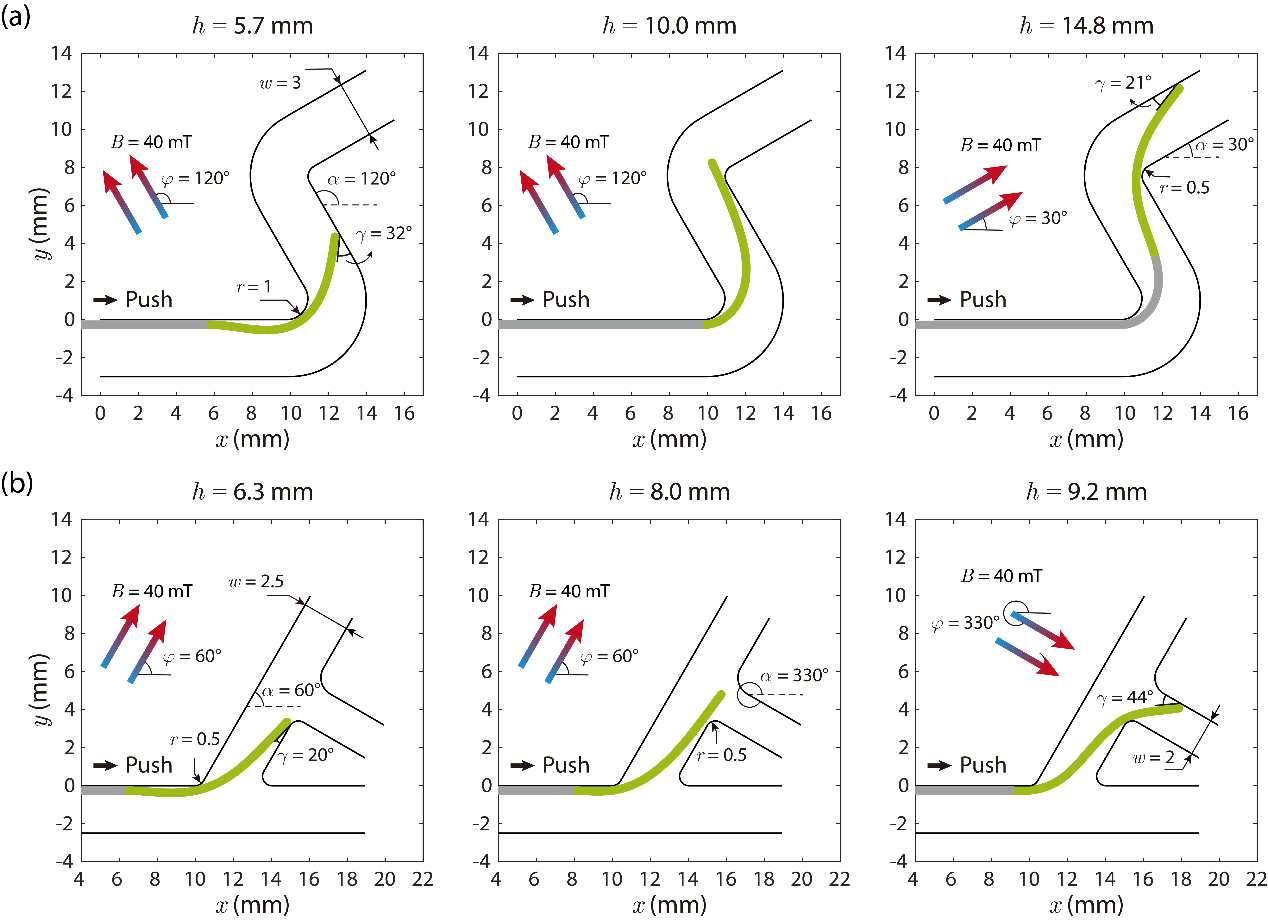
图6 磁性软体导丝在具有多转弯的(a)弯曲型和(b)分叉型血管中的导航过程
该研究为磁性软体导丝在真实血管环境中的导航开发了一套理论框架,以两种主要的血管类型(弯曲型和分叉型)为代表,结合硬磁弹性杆理论和最小能量原理准确描述了磁性软体导丝在两种血管约束下的变形。此外,该研究指出了导丝尖端与血管壁间接触角可作为导丝能否安全通过血管转弯处的判断准则,即当接触角小于临界接触角时导丝可安全过弯。基于此准则提出了磁场调控策略以减小导丝导航过程中的接触角,从而降低接触压强、提高安全性。该理论框架可快速构建涵盖不同尺寸和形状血管类型的接触角数据库,用于复杂血管环境下磁性软体导丝安全导航的术前评估,为磁性软体导丝在血管介入手术中的远程精准控制奠定基础。
该研究工作得到了国家自然科学基金的资助。
附件下载: